FAIRINO FR5
可搬重量
5kg
最大リーチ
922mm
繰返し精度
±0.02mm
| ペイロード | 5kg |
| リーチ | 922mm |
| 自由度 | 6 回転ジョイント |
| インターフェース | 「10.1インチティーチングペンダント」もしくは 「ウェブアプリ」 |
| 繰返し精度 | ±0.02mm |
| ポジション再現性 (ISO 9283) | ±0.03mm |
| TCP 速度 | 1m/s |
| IP クラス | IP54(IP65 Optional) |
| ノイズ | <65db |
| I/O ポート | digital input (DI) 2 digital output (DO) 2 analog input(AI) 2 analog ouput(AO) 2 High speed pulse input 2 |
| ツール I/O パワーサプライ | 24V/1.5A |
| 重量 | ≈22kg(ケーブルの重さは含まず) |
| 動作温度 | 0-45℃ |
| 動作湿度 | 90%RH(結露なきこと) |
| 素材 | アルミニウム、スチール |

FAIRINO FR5の設置
FR5の設置に関する図面です。
M8のボルトを4本使います。(締め付けトルク≧20Nm)
衝突時にロボットがすれることを防止するために位置決めピンを取り付けることをお勧めします。
位置決めピンはΦ8を2本です。
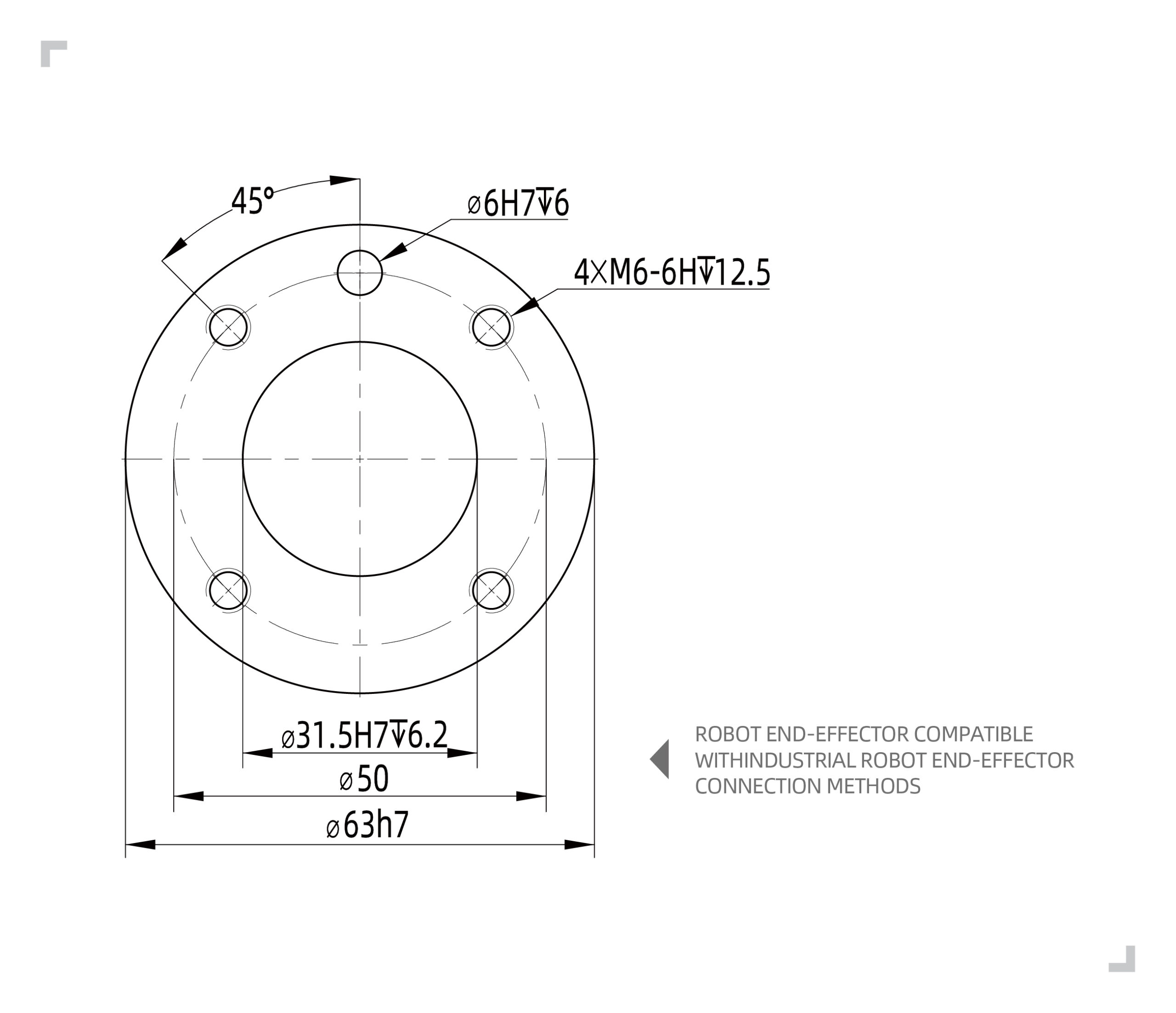
エンドエフェクター取付
エンドエフェクターを取り付けるためのロボット先端フランジの図面です。
4つのM6のネジ穴を使います。
衝突時にエンドエフェクターがすれることを防止するために位置決めピンを取り付けることをお勧めします。
位置決めピンはΦ6を1本です。
FR3/FR5/FR10/FR16共通です。