FAIRINO 協働ロボット|正規代理店 株式会社永山
単純作業は自動化へ
FAIRINOが現場に革新を
FAIRINOの導入をお考えなら正規代理店の株式会社永山へ。
大阪を拠点に全国対応で、FR3〜FR30の全シリーズを取り扱い、導入・設定・トレーニング・保守まで一貫サポートします。
FAIRINOとは
FAIRINO(ファイリノ)は、3kgから30kgまで対応する協働ロボットシリーズです。
全モデルが繰り返し精度 ±0.02〜0.1mm を実現し、直感的に扱える操作性を備えています。
製造業・物流・教育など幅広い現場で利用でき、標準でIP54の防塵・防滴性能、オプションでIP65にも対応。
さらにCEマークを取得し、国際的な安全基準に準拠しています。
「導入コストが高い」「プログラミングが難しい」といった従来の課題に対して、FAIRINOは導入しやすい価格帯と誰でも扱いやすい設計を両立し、中小企業を含む多様なユーザーに実用的な選択肢を提供します。
FAIRINO 協働ロボット FRシリーズ ラインナップ
FAIRINOのFRシリーズは、用途に応じたさまざまなモデルを取り揃えています。 軽作業から重作業まで対応でき、いずれのモデルも高い精度と柔軟性を兼ね備えています。 以下は各モデルの主要なスペックです。
| 製品 | FAIRINO FR3 | FAIRINO FR5 | FAIRINO FR10 | FAIRINO FR16 | FAIRINO FR20 | FAIRINO FR30 |
| ペイロード | 3Kg | 5Kg | 10Kg | 16Kg | 20Kg | 30Kg |
| 作業半径 | 622mm | 922mm | 1400mm | 1034mm | 1854mm | 1403mm |
| 繰返し精度 | ±0.02mm | ±0.02mm | ±0.05mm | ±0.03mm | ±0.1mm | ±0.1mm |

DOCUMENTATION
日本語対応オンラインマニュアル
セットアップ〜運用までを網羅。最短で立ち上げるための公式リファレンス。
FAIRINOの強み

FAIRINOの協働ロボットは、直感的な操作環境を特徴としています。専用のティーチペンダントやWebアプリを通じて、ドラッグ&ドロップによるグラフィカルプログラミングや、実機を直接動かして記録するティーチング機能に対応しており、動作設定をスムーズに行うことができます。
さらに、設置環境に合わせた柔軟な対応力も強みのひとつです。標準仕様でIP54、防塵・防滴オプションでIP65に対応できるため、一般的な製造環境から粉塵や水滴のある現場まで幅広く導入可能です。製造はISO 9001に準拠した品質管理体制のもとで行われ、国際的な信頼性を確保しています。
FAIRINOは、中国を拠点としながら欧州・アジアを含むグローバル展開を進めており、すでに世界各地で協働ロボットの導入実績を積み重ねています。こうした国際展開と実績の広がりも、FAIRINOの大きな強みです。
まずは課題をお聞かせください
用途・可搬重量・リーチが決まっていなくてもOK。
最適モデルと概算費用をご提案します。
FAIRINOの特長

直感的に使える操作性
FAIRINOは、タッチパネルやマウス操作に対応した視覚的にわかりやすいユーザーインターフェース(UI)を備えています。
プログラムの作成はアイコン選択やドラッグ&ドロップで行えるため、専門的な知識がなくても設定が可能です。短時間のトレーニングで現場の作業者が操作できるようになり、導入初日から実務に活用できます。
コストパフォーマンスに優れた設計
主要コンポーネント(サーボシステムや減速機など)を自社製造しているため、高性能を維持しながらコストを抑えた製品提供が可能です。
その結果、協働ロボットの中でも導入しやすい価格帯を実現し、中小企業を含む幅広い現場で採用が進んでいます。

正規代理店による安心サポート
株式会社永山は、大阪を拠点とするFAIRINO(ファイリノ)協働ロボットの正規代理店です。
導入前のご相談から設置支援、初期設定、操作トレーニング、導入後のトラブル対応まで、日本語でフルサポートを提供しています。
「初めてロボットを導入する」企業や教育機関にとっても、安心してご利用いただける体制を整えています。
FAIRINOの活躍分野
製造・物流をはじめ、FAIRINOはあらゆる現場で省力化と効率化を実現します。
安全性と操作性に優れた協働ロボットとして、人とロボットが共に働く新しいワークスタイルを創り出しています。
製造業・物流の現場で
FAIRINOのロボットは、組み立て作業や部品搬送といった製造工程の自動化に貢献しています。人手不足の解消や生産性の向上、コスト削減に役立ち、中小工場を含め多くの現場に導入が進んでいます。 また、倉庫や配送センターなど物流の現場では、物品のピッキングや運搬を担い、作業効率化を実現しています。
医療現場・教育機関でも
医療分野では、患者移動の補助や医療器具の管理をFAIRINOが担う事例が増えており、スタッフの負担軽減やケアの質向上に貢献しています。 教育分野では、ロボティクス教育やプログラミング学習に活用され、学生が実機を通じて実践的なスキルを習得できます。

研究・サービス分野にも広がる活用
近年は研究機関やサービス分野でもFAIRINOの導入が進んでいます。研究室における実験の自動化や検証作業の効率化に加え、展示会やイベントでの案内・デモンストレーションなど、多様な用途での応用が広がっています。

よくあるご質問(Q&A)
FAIRINOの特長や性能について
-
FAIRINOの強みと他社との違いは?
-
FAIRINOは高精度・高可搬ながら導入コストを抑えた協働ロボットです。
独自開発のサーボシステムと直感的な操作UIにより、初めての方でも短期間で稼働可能。
さらに、CE認証やISO9001準拠の品質管理体制を備え、信頼性と安全性を両立しています。
-
モデルごとの違いと選び方は?
-
FAIRINO FRシリーズは3kgから30kgまでのラインナップがあり、
作業内容・対象物の重量・リーチ距離によって最適なモデルを選定します。
用途が未定の場合でも、ご相談いただければ最適機種を無料でご提案いたします。
-
導入時の設置条件や準備はありますか?
-
非常にコンパクトかつ軽量な設計のため、省スペースの現場でもスムーズに設置できます。作業机の隣やラインの合間など、柔軟に配置できるのが魅力です。コントロールボックスも小型で、設置の自由度が高い点が好評です。
-
どんな作業・業種で活用できますか?
-
製造・物流・研究・教育・医療など、あらゆる分野で活用されています。
たとえば組立・ねじ締め・検査・搬送・包装など、人手不足解消や効率化に最適です。
プログラミングが不要なドラッグ操作で、現場スタッフでも簡単に設定できます。
導入・操作・サポートについて
-
操作は簡単ですか?
-
はい。タッチパネルとWebアプリで、直感的に操作できます。
アームを直接動かして動作を記録する「ドラッグティーチング」に対応しており、
専門知識がなくても基本操作を短時間で習得できます。
-
導入までの納期とサポート体制は?
-
通常はご注文から6~8週間程度で納品可能です。
設置・初期設定・トレーニング・アフターサポートまで一貫して日本語対応で行っています。
万一の不具合時も迅速な代替対応・部品供給を行い、安定稼働を支援します。
-
他の機器・システムと連携できますか?
-
はい。PLCやカメラ、各種センサーとの連携に対応しています。
Ethernet/Modbus/Digital I/Oなど標準インターフェースを備えており、
他社装置や既存ラインへの組み込みも柔軟に対応可能です。
まずは要件だけ、かんたん送信
※ 担当より3営業日以内にご連絡いたします。
詳細は下部のフルフォームでも受付中です。
導入事例紹介
FAIRINOの協働ロボットは、製造業や物流、研究・教育の現場など幅広い分野で活用されています。
ここでは、実際の導入シーンを動画でご紹介します。作業効率化や人手不足解消にどのように貢献しているのか、ぜひご覧ください。
導入事例 ①マシンテンディングソリューション
この動画では、FAIRINO の協働ロボットによる Pick & Place 自動化実例 をご覧いただけます。ロボットが物品を掴み → 所定の位置に配置する一連の動作を高速かつ正確に繰り返しており、多品種少量生産の現場でも信頼できる稼働性が確認できます。この種の自動化により、手作業による時間・ミスが削減され、現場の生産効率が大きく向上することが期待されます。操作は設定が簡易で、プログラム切替や動作調整も比較的短時間で可能な様子が映っており、FAIRINOの「導入しやすさ」が伝わる内容です。
導入事例 ②パッキングソリューション
この動画では、FAIRINO の協働ロボットによる Packing(箱詰め)自動化実例をご覧いただけます。ロボットが製品を確実に掴み、箱の内部へ整然と配置する一連の作業をスムーズに繰り返しており、梱包工程における効率化と品質安定性を実現しています。作業対象の向きや位置を柔軟に調整しながら配置する様子から、多様な形状やサイズの商品にも対応できる汎用性がうかがえます。このような自動化によって、従来の手作業に比べて時間短縮とヒューマンエラーの削減が可能となり、人手不足が課題となる物流・製造現場において大きな効果を発揮します。さらに、直感的な操作インターフェースによりプログラム切替や調整も容易で、現場の要求に合わせた柔軟な稼働が短時間で実現できる点が特徴です。FAIRINOの「扱いやすさ」と「即効性」が伝わる事例となっています。
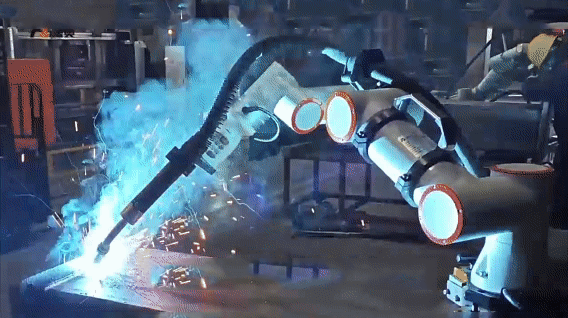
導入事例 ③ねじ締め(Screwing)ソリューション
この動画では、FAIRINO の協働ロボットによる 自動ねじ締め工程 をご覧いただけます。ロボットがネジを正確に把持し、所定の位置へ誘導して適切なトルクで締め付ける一連の動作をスムーズに繰り返しており、自動車部品の組立ラインなど高精度が求められる現場においても安定した作業品質を実現しています。従来の手作業では、ねじ位置のわずかなズレや締め付けトルクのばらつきが品質不良につながることがありましたが、本システムではそのリスクが大幅に軽減。高速かつ均一な作業により、ライン全体の効率化と品質安定性に寄与しています。
FAIRINO FRシリーズ サポート / 技術資料
導入後すぐに役立つ「開封・初期設定・操作ガイド」などの技術資料をまとめました。
初めてFAIRINOを導入される方も、安心して稼働確認が行えます。
詳細は FAIRINO サポートページ をご覧ください。
また、FAIRINO FR5 協働ロボット など各モデルの仕様も掲載しています。
FAIRINOの開発企業について

FAIRINOは、中国を拠点とするロボット・AIソリューション企業が開発しています。
社名は Flexible(柔軟性)・Advanced(先進性)・Intelligent(知能性)・Reliable(信頼性)・Innovative(革新性) の頭文字に由来します。
同社は協働ロボット「FRシリーズ」を中心に、産業用ロボットや自動化ソリューションを展開。
ラインナップには FR3、FR5、FR10、FR16、FR20、FR30 などがあり、用途に応じた幅広い選択肢を提供しています。FAIRINOは、スマートマニュファクチャリングを支えるパートナーとして世界各国の現場にロボットを届けています。
導入に関するご相談・お見積りはこちら